

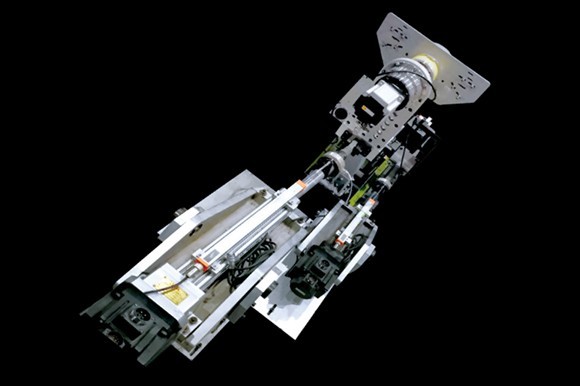

机械位移发生器

机械位移发生器主要用于操作系统静、动态特性测试,主要包含控制部分和位移作动器。试验过程中,作动器接收系统输出的指令,主要以阶跃和正弦信号为主要控制波形,通过作动器产生的位移信号,模拟操作纵驾驶杆和脚蹬运动,从而进行系统的动态特性分析。

系统输出幅值 | 3Hz 线位移≥15mm 角位移≥9° | |
2Hz 线位移≥20mm 角位移≥12° | ||
1Hz 线位移≥25mm 角位移≥15° | ||
系统输出和测量频率范围 | 0.01Hz~10Hz | |
驾驶盘运动 | 前后直线行程范围 | 前推≥140mm,后拉≥175mm;输出力范围:最大操纵力1400N |
左右旋转运动 | 旋转角度范围:90度 操纵力矩≥80N·m | |
脚蹬机构运动 | 前后直线行程范围±100mm; 输出力范围:最大操纵力1400N;2通道 | |
下位控方式 | 系统静态精度±0.1%FS | |
力控制方式 | 静态输出力误差:小于0.1%FS | |
信号发生器全行程测量精度 | 0.3%FS | |
动载载荷值的控制精度 | ±1.5%FS | |
持续工作时间 | 48小时 | |
可对扫频试验频率范围、幅值进行设置和更改,具有脉冲、正弦,方波、斜波、三角波等波形信号的输出; 设备安装应满足驾驶舱试验环境安装空间 | ||
 企业站手机版
企业站手机版